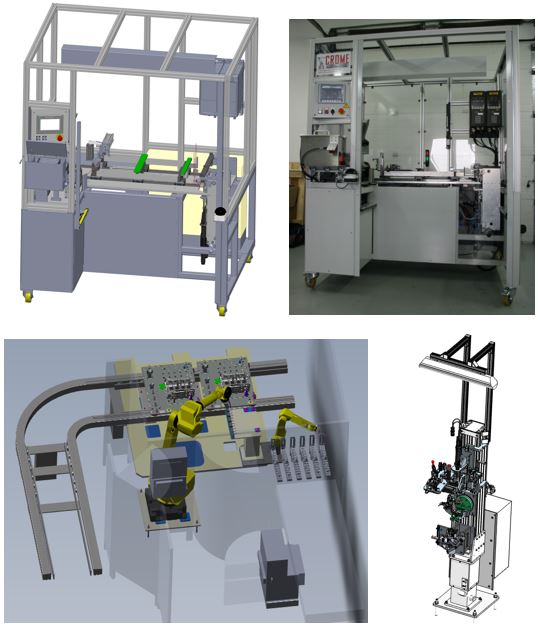
Conception mécanique 3D / 2D Création de moyens neufs Modification de moyens d’assemblage existants Modélisation de l’environnement permettant le choix et l’implantation de robots Études pneumatiques et hydrauliques Assemblage et mise au point